
로봇 솔루션, 특히 코봇은 인쇄 산업, 특히 와이드 포맷에서 점점 더 널리 사용되고 있습니다. 프레스 로딩/언로딩 및 절단 테이블과 같은 반복적인 작업에 탁월하여 생산성과 안전성을 높여줍니다. 아그파, 더스트, 쥰드와 같은 주요 업체는 통합 시스템을 제공합니다. 초기 투자와 프로그래밍에 상당한 비용이 들지만, 비용 절감과 통합성 향상으로 로봇 공학은 인쇄 공장의 물리적 워크플로우를 자동화하는 데 매우 중요한 역할을 합니다.
최근 페스파 전시회에서 가장 눈에 띄는 특징 중 하나는 주로 프레스뿐만 아니라 커팅 테이블에도 사용되는 크고 작은 로봇 솔루션의 수가 증가하고 있다는 점입니다. 이는 생산성 향상을 위한 자동화에 대한 광범위한 추세의 일부입니다.
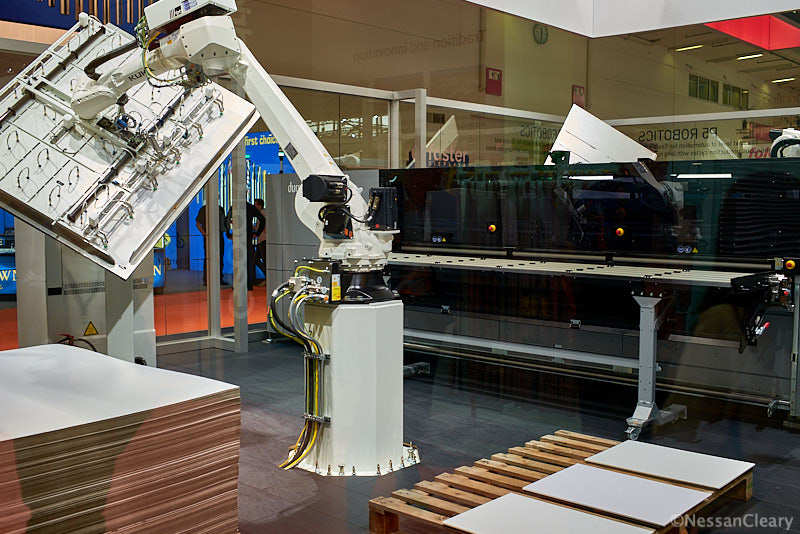
로봇은 보드나 시트를 평판 위에 놓고 인쇄가 끝나면 팔레트로 옮기는 등의 반복적인 작업에 매우 능숙합니다. 휴식이나 휴식이 필요 없으며 시간당 천 개 이상의 보드를 옮기는 작업도 쉽게 처리할 수 있습니다. 로봇은 발에 물건을 떨어뜨리거나 허리 근육에 무리를 줄 위험 없이 무거운 무게를 운반할 수 있기 때문에 건강과 안전 측면에서 로봇을 더 많이 활용해야 한다는 주장도 있습니다.
로봇은 가정용 진공 청소기부터 행성 간 착륙선에 이르기까지 다양한 크기, 모양, 구성으로 제공됩니다. 기본적으로 센서를 장착한 기계로, 의사 결정을 내리고 작업을 수행하기 위해 연산을 수행하는 기계입니다.
페스파 전시회에서 볼 수 있는 대부분의 로봇 솔루션은 협동 로봇 또는 코봇이라고 부르는 것이 더 정확합니다. 공장 현장에서 사람과 함께 작업하고 센서를 사용하여 사람을 감지하고 사고를 방지하도록 설계되었습니다. 인쇄에 사용되는 대부분의 로봇 팔은 무거운 무게를 다룰 수 있도록 고정된 위치에 볼트로 고정되어 있습니다.
플렉소 인쇄기에 판 실린더를 적재하거나 제본 라인에 책 블록을 배치하거나 B1 오프셋 인쇄기로 용지 팔레트를 옮기는 등 다양한 용도로 인쇄 업계 전반에 걸쳐 로봇 솔루션이 등장하고 있습니다. 와이드 포맷의 경우 평판 및 하이브리드 프레스에서 보드와 시트를 로딩 및 언로딩하는 데 가장 일반적으로 사용됩니다.
이러한 로봇 팔은 특정 동작 또는 축으로 제한됩니다. 대부분의 와이드 포맷 인쇄에는 6축의 이동이 필요합니다. 이론상으로는 5축이면 소재를 집어 들고, 회전하고, 팔레트에서 침대로 옮기고, 다시 내려놓는 데 충분합니다. 하지만 시트를 뒤집어 뒷면에 인쇄할 수 있도록 하려면 여섯 번째 축이 필요합니다.
대부분의 하이브리드 프린터에는 한쪽 로봇은 로딩하고 다른 쪽 로봇은 언로딩하는 별도의 솔루션이 필요합니다. 전체 워크플로도 고려해야 합니다. 프린터 옆에 커팅 테이블을 두고 한 대의 로봇이 프린터에서 커팅 테이블로 인쇄된 기판을 직접 이동하는 것이 더 효율적일 수 있습니다. 신중하게 배치하면 동일한 로봇이 인쇄된 기판을 프레스에서 꺼내 팔레트에 올려놓은 다음, 필요할 때 다시 팔레트에서 커팅 테이블로 기판을 옮길 수도 있습니다.
그러나 마찬가지로 로봇 팔레트 이동기를 사용하여 팔레트에 담긴 미디어를 프레스에 전달한 다음 완성된 보드 더미를 다음 마무리 공정으로 옮길 수 있습니다. 사용 중인 그리퍼 헤드에 따라 절단 테이블과 함께 사용하여 잘라낸 품목을 집어 들고 폐기물은 컨베이어에서 쓰레기통에 버릴 수 있습니다.
사용 중인 로봇 공학
현재 아그파가 소유하고 있는 Inca Digital은 오랫동안 로보틱스를 사용하여 적재 및 하역을 자동화하는 것을 지지해 왔습니다. 아그파는 Inca를 인수한 이후 이를 수용하여 최근 베를린에서 열린 Fespa Global 전시회에서 완전 자동 로딩을 위한 쌍둥이 로봇인 Max Bots를 선보였으며, 최신 세대 Onset Panthera 플랫베드에서도 이 로봇을 선보였습니다.

더스트는 또한 와이드 포맷 하이브리드 프레스 P5 제품군을 위한 로봇 솔루션을 개발했습니다. 주로 로봇을 통한 생산성 향상으로 투자 비용을 정당화할 수 있는 인쇄 속도를 갖춘 P5 350 HS 프린터와 함께 사용됩니다. 전체 솔루션에는 프린터 양쪽에 두 대의 로봇이 있는데, 하나는 공급용 로봇이고 다른 하나는 인쇄된 작업을 쌓는 로봇입니다.
이 시스템에는 측면에 각진 등록 스테이션이 있어 로봇이 스택에서 시트를 집어 스테이션에 떨어뜨린 후 다시 집어 올리는데, 이번에는 보드의 위치를 정확히 파악하여 프린터의 정확한 위치에 놓을 수 있습니다. 이러한 기계적 등록 방식은 골판지뿐만 아니라 호일지와 같은 얇은 소재도 처리할 수 있으며 센서를 사용하는 것보다 더 빠르고 정확합니다.

Zund는 표준 및 맞춤형 로봇 처리 솔루션을 모두 개발하는 덴마크 회사인 RobotFactory와 파트너십을 맺었습니다. 로딩뿐만 아니라 완성된 물건을 골라 포장하는 데에도 사용할 수 있습니다. 로봇팩토리는 산업용 로봇뿐만 아니라 빠르고 쉽게 배포할 수 있도록 설계된 소형 시스템인 PortaTable도 공급합니다.
통합 및 서비스
고객이 고려해야 할 여러 가지 요소가 있습니다. 이 중 가장 분명한 것은 필요한 통합의 정도입니다. 이론상으로는 인쇄 서비스 제공업체가 로봇 회사와 직접 협력하여 자체 자동 로딩/언로딩 솔루션을 구축하는 것을 막을 수 없습니다. 그러나 실제로는 보증을 무효화하지 않고 시스템과 통합하기 위해 프레스 공급업체를 통해 수행하는 것이 가장 좋습니다. 또한 프레스 공급업체는 대부분의 인쇄업체가 사용하는 다양한 용지를 분리하고 처리하는 데 필요한 전문 지식을 갖추고 있습니다.
이러한 기계는 산업용 기계이므로 수명이 매우 길어야 합니다. 이는 프린터의 수명보다 길어질 수 있으므로 향후 다른 프레스와 함께 작동하도록 로봇의 용도를 변경하는 방법과 추가 통합 작업 비용을 누가 부담할 것인지도 고려해야 합니다. 또한 로봇 솔루션에 대한 별도의 서비스 계약이 필요합니다.
결론적으로 로봇은 주로 프로그래밍이 필요하기 때문에 구현하는 데 비용이 많이 듭니다. 그러나 이러한 기능이 더 널리 보급되고 공급업체가 이를 더 잘 통합하는 방법을 배우게 되면 비용은 낮아질 것입니다. 더 중요한 것은 자동화로 인해 작업 파일이 생산 과정에서 이동하는 방식이 이미 강화되었으므로, 다음 주요 병목 현상은 빈 용지에서 완제품에 이르기까지 작업 파일이 인쇄 공장에서 물리적으로 이동하는 방식입니다.