
Robottiratkaisut, erityisesti cobotit, ovat yhä yleisempiä painoteollisuudessa, erityisesti laajakuvapainossa. Ne suoriutuvat erinomaisesti toistuvista tehtävistä, kuten puristimien ja leikkauspöytien lastaamisesta ja purkamisesta, mikä lisää tuottavuutta ja turvallisuutta. Tärkeimmät toimijat, kuten Agfa, Durst ja Zund, tarjoavat integroituja järjestelmiä. Vaikka alkuinvestoinnit ja ohjelmointi ovat merkittäviä, alenevat kustannukset ja parempi integrointi tekevät robotiikasta ratkaisevan tärkeää painotehtaiden fyysisten työnkulkujen automatisoinnissa.
Yksi viimeisimpien Fespa-messujen silmiinpistävimmistä piirteistä on ollut pienten ja suurten robottiratkaisujen kasvava määrä, joita käytetään pääasiassa puristimissa mutta myös leikkauspöydissä. Tämä on osa laajempaa suuntausta kohti automaatiota tuottavuuden parantamiseksi.
Robotit ovat erittäin hyviä toistuvissa tehtävissä, kuten levyjen tai arkkien asettamisessa tasolevyyn ja niiden siirtämisessä paletille, kun ne on tulostettu. Heidän ei tarvitse pitää taukoa tai lomaa, ja he pystyvät helposti siirtämään tuhatta lautaa tai enemmän tunnissa. Myös terveys- ja turvallisuusnäkökohdat puoltavat robottien käytön lisäämistä, sillä ne voivat kantaa raskaita painoja ilman, että on vaarana, että ne pudottavat jotain jalkoihinsa tai rasittavat selkälihaksiaan.
Robotteja on monen kokoisia, -muotoisia ja -kokoonpanoisia kotipölynimureista planeettojen välisiin laskeutumisaluksiin. Pohjimmiltaan ne ovat antureilla varustettuja koneita, jotka suorittavat laskutoimituksia päätöksiä ja toimia varten.
Useimpia Fespa-messuilla nähtävistä robottiratkaisuista voidaan kuvailla tarkemmin yhteistyöroboteiksi tai coboteiksi. Ne on suunniteltu työskentelemään tehtaan lattialla ihmisten rinnalla, ja ne käyttävät antureita ihmisten havaitsemiseen ja onnettomuuksien välttämiseen. Useimmat painamisessa käytettävät käsivarret ovat robottikäsivarret, jotka on kiinnitetty kiinteään asentoon, jotta ne voivat käsitellä raskaita painoja.
Robottiratkaisuja käytetään kaikkialla painoteollisuudessa erilaisiin käyttötarkoituksiin, kuten levysylinterien lataamiseen fleksopainokoneissa, kirjapainojen sijoittamiseen sidontalinjoille tai paperipalettien siirtämiseen B1-offsetpainokoneisiin. Laajakuvapainokoneissa niitä käytetään yleisimmin levyjen ja arkkien lataamiseen ja purkamiseen taso- ja hybridipainokoneista.
Nämä robottikäsivarret on rajoitettu tiettyihin liikkeisiin eli akseleihin. Useimmissa laajakuvatulostuksissa tarvitaan kuusi liikeakselia. Teoriassa viisi akselia riittää substraattien nostamiseen, pyörittämiseen, siirtämiseen paletilta sängylle ja uudelleen asettamiseen. Mutta jos haluat myös kääntää arkit ja tulostaa ne kääntöpuolelle, tarvitset kuudennen akselin.
Useimmissa hybriditulostimissa tarvitaan erillisiä ratkaisuja, joissa yksi robotti lataa ja toinen purkaa toisella puolella. Kannattaa myös harkita koko työnkulkua. Saattaa olla tehokkaampaa, että leikkauspöytä on tulostimen vieressä ja että yksi robotti siirtää tulostetut levyt suoraan tulostimesta leikkauspöydälle. Huolellisen sijoittelun ansiosta sama robotti voi myös ottaa tulostetut levyt painokoneesta ja asettaa ne paletille, minkä jälkeen se voi tarvittaessa palata ja siirtää levyt paletilta leikkauspöydälle.
Yhtä lailla voit kuitenkin käyttää robotisoituja palettien siirtäjiä, jotka toimittavat palettikuorman painovälineitä painokoneeseen ja vievät sitten pinon valmiita levyjä seuraavaan viimeistelyprosessiin. Riippuen käytetystä tarttujapäästä niitä voidaan käyttää leikkauspöytien kanssa poimimaan leikatut kappaleet, jolloin jätteet voidaan pudottaa kuljettimelta säiliöön.
Käytössä oleva robotiikka
Inca Digital, joka on nykyään Agfan omistuksessa, on jo pitkään kannattanut robotiikan käyttöä lastaus- ja purkutoimintojen automatisoimiseksi. Agfa on ottanut tämän käyttöön Incan oston jälkeen ja esitteli taannoisessa Fespa Global -messuilla Berliinissä Tauro XUHS -laitteen täysin automatisoitua lastausta varten kaksoistorobotteja, joita se kutsuu nimellä Max Bots, sekä uusimman sukupolven Onset Panthera -lattialustan.

Durst on myös kehittänyt robottiratkaisun P5-tuoteperheen laajakuvahybridipainokoneisiinsa. Niitä käytetään pääasiassa P5 350 HS -tulostimen kanssa, jonka tulostusnopeus on riittävä, jotta robotti voi lisätä tuottavuutta ja siten perustella investointikustannukset. Täydelliseen ratkaisuun kuuluu kaksi robottia tulostimen molemmin puolin, joista toinen syöttää ja toinen pinoaa tulostetut työt.
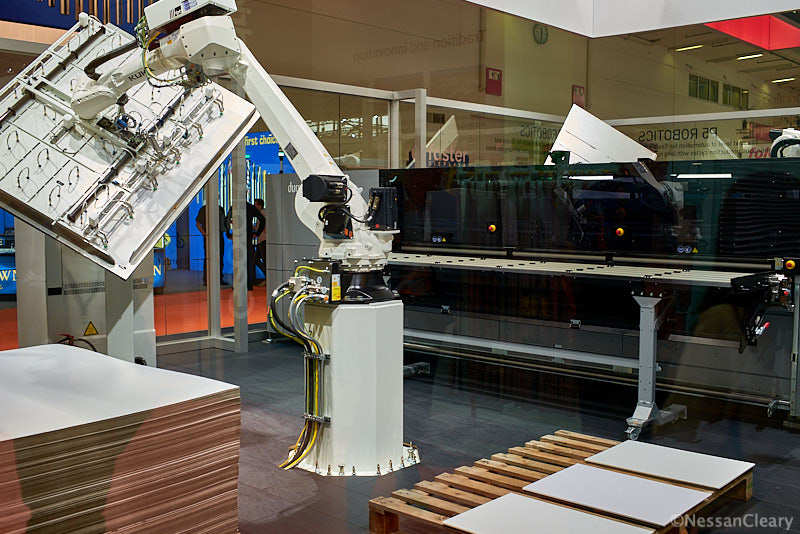
Järjestelmässä on sivussa kulmikas rekisteröintiasema, joten robotti poimii arkin pinosta, pudottaa sen asemalle ja poimii sen uudelleen, tällä kertaa tietäen tarkalleen, missä levy on, jotta se voi asettaa sen tulostimelle täsmälleen oikeaan kohtaan. Tämä mekaaninen lähestymistapa rekisteröintiin mahdollistaa ohuiden materiaalien, kuten foliopaperin ja kartongin, käsittelyn, ja se on nopeampi ja tarkempi kuin anturin käyttö.

Zund on tehnyt yhteistyötä tanskalaisen RobotFactoryn kanssa, joka kehittää sekä vakio- että räätälöityjä robottien käsittelyratkaisuja. Niitä voidaan käyttää lastaukseen, mutta myös valmiiden esineiden poimintaan ja pakkaamiseen. Teollisuusrobottien lisäksi RobotFactory toimittaa myös pienempiä järjestelmiä, PortaTables-järjestelmiä, jotka on suunniteltu nopeaan ja helppoon käyttöönottoon.
Integrointi ja huolto
Asiakkaiden on otettava huomioon useita tekijöitä. Näistä ilmeisin on tarvittava integraatioaste. Teoriassa mikään ei estä tulostuspalvelujen tarjoajaa tekemästä yhteistyötä suoraan robotiikkayrityksen kanssa ja perustamasta omaa automaattista lastaus- ja purkausratkaisua. Käytännössä tämä on kuitenkin luultavasti parasta tehdä painokoneen toimittajan kautta, jotta se voidaan integroida sen järjestelmiin ilman, että sen takuu mitätöityy. Lisäksi painokoneiden toimittajilla on myös asiantuntemusta, jota tarvitaan useimpien painotalojen käyttämien monien erilaisten materiaalien erotteluun ja käsittelyyn.
Nämä ovat teollisuuskoneita, ja niiden pitäisi kestää hyvin pitkään. Tämä voi olla pidempi kuin tulostimen käyttöikä, joten sinun on myös pohdittava, miten robotit voidaan käyttää tulevaisuudessa muiden painokoneiden kanssa ja kuka vastaa mahdollisista integrointikustannuksista. Tarvitset myös erillisen huoltosopimuksen robottiratkaisua varten.
Yhteenvetona voidaan todeta, että robottien toteuttaminen on kallista lähinnä siksi, että robottien ohjelmointi vaatii paljon työtä. Mutta kun ne yleistyvät ja toimittajat oppivat integroimaan ne paremmin, kustannukset laskevat. Vielä tärkeämpää on se, että kun automaatio on jo tiukentanut tapaa, jolla työtiedostot kulkevat tuotannon läpi, seuraava merkittävä pullonkaula on se, miten nämä työt fyysisesti kulkevat painotehtaan läpi tyhjältä materiaalilta valmiiksi tuotteiksi.